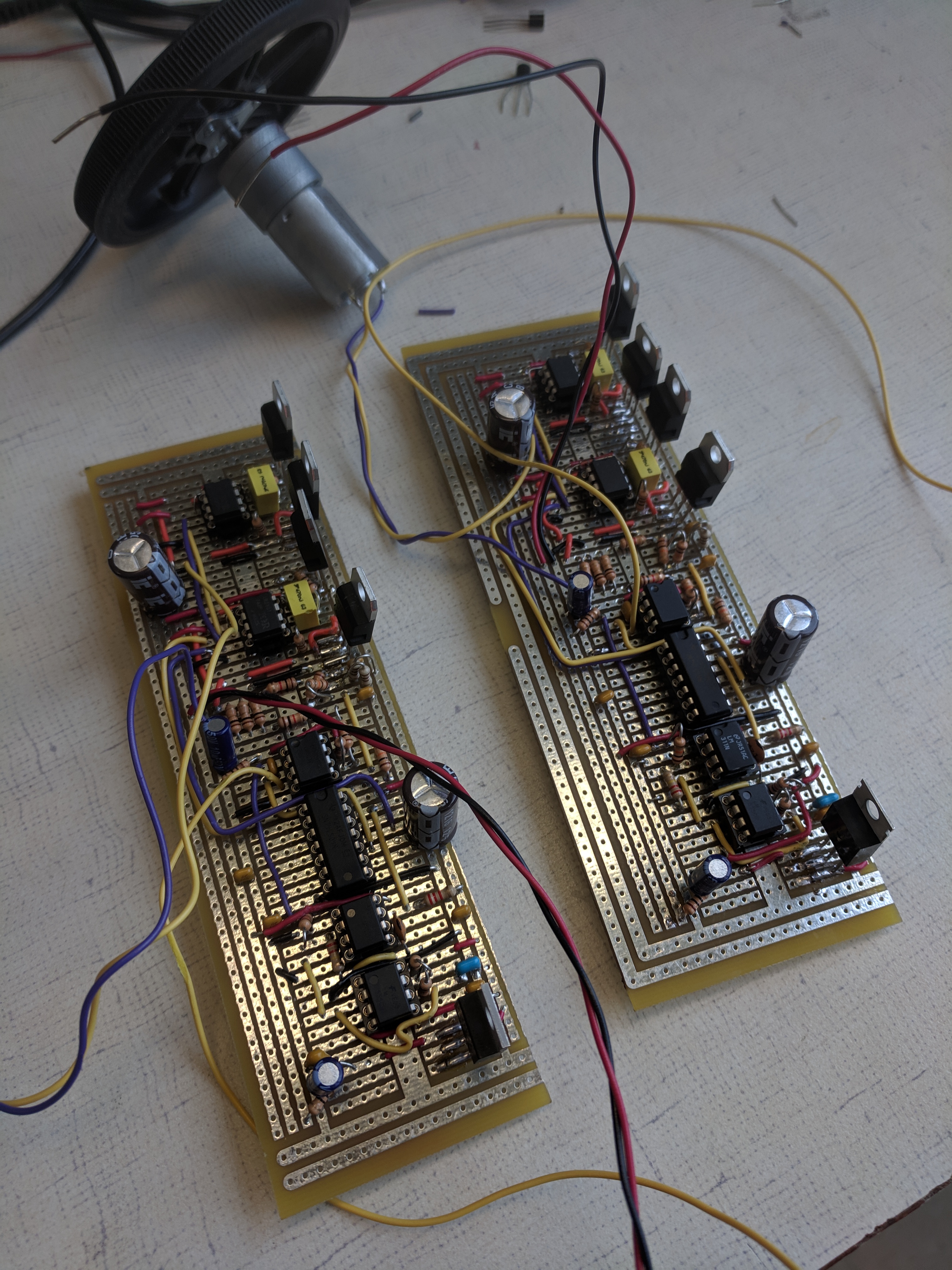
Links to pdfs of the control circuit, current controlled motor driver, and radio receiver decoder.
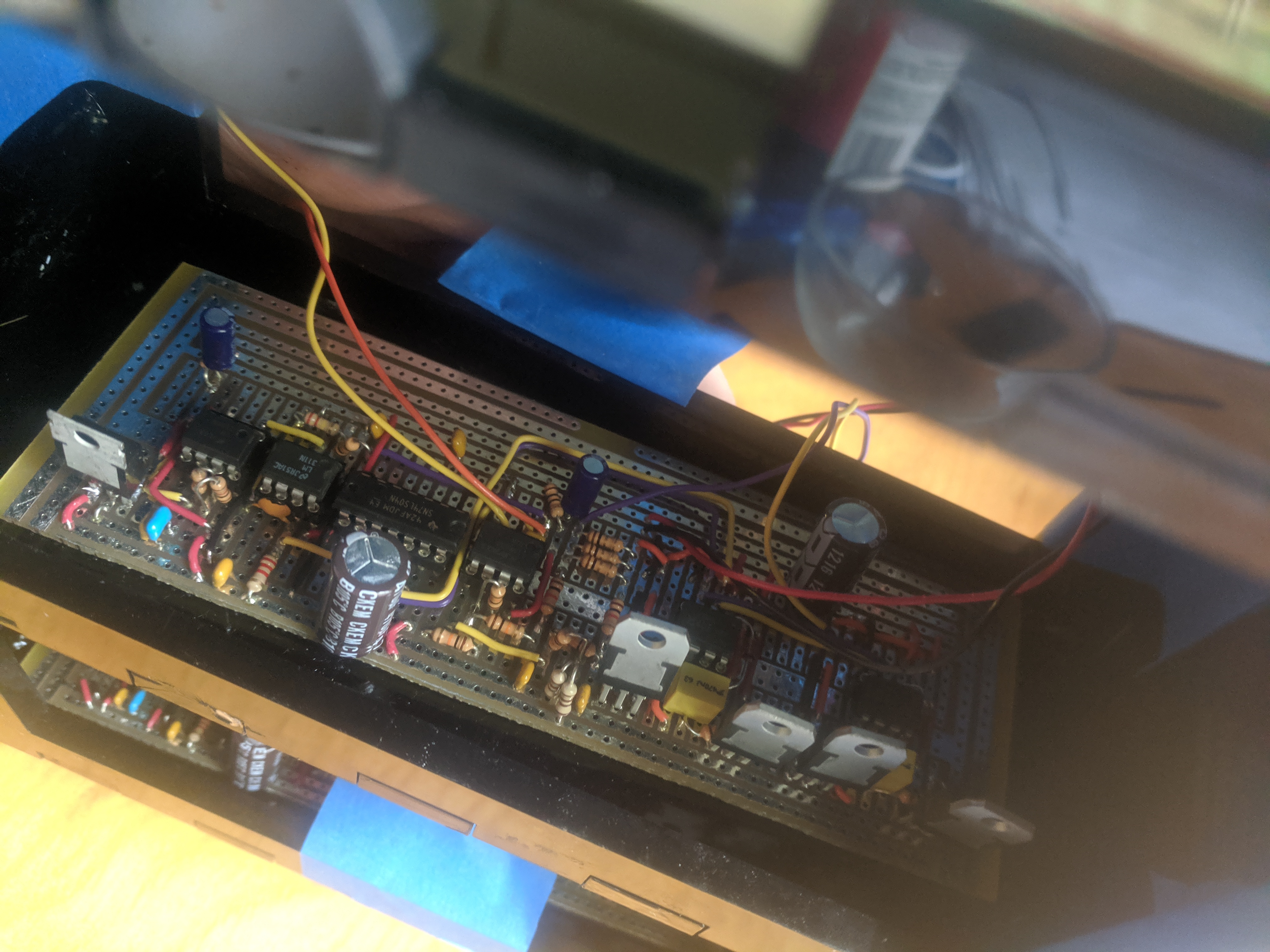
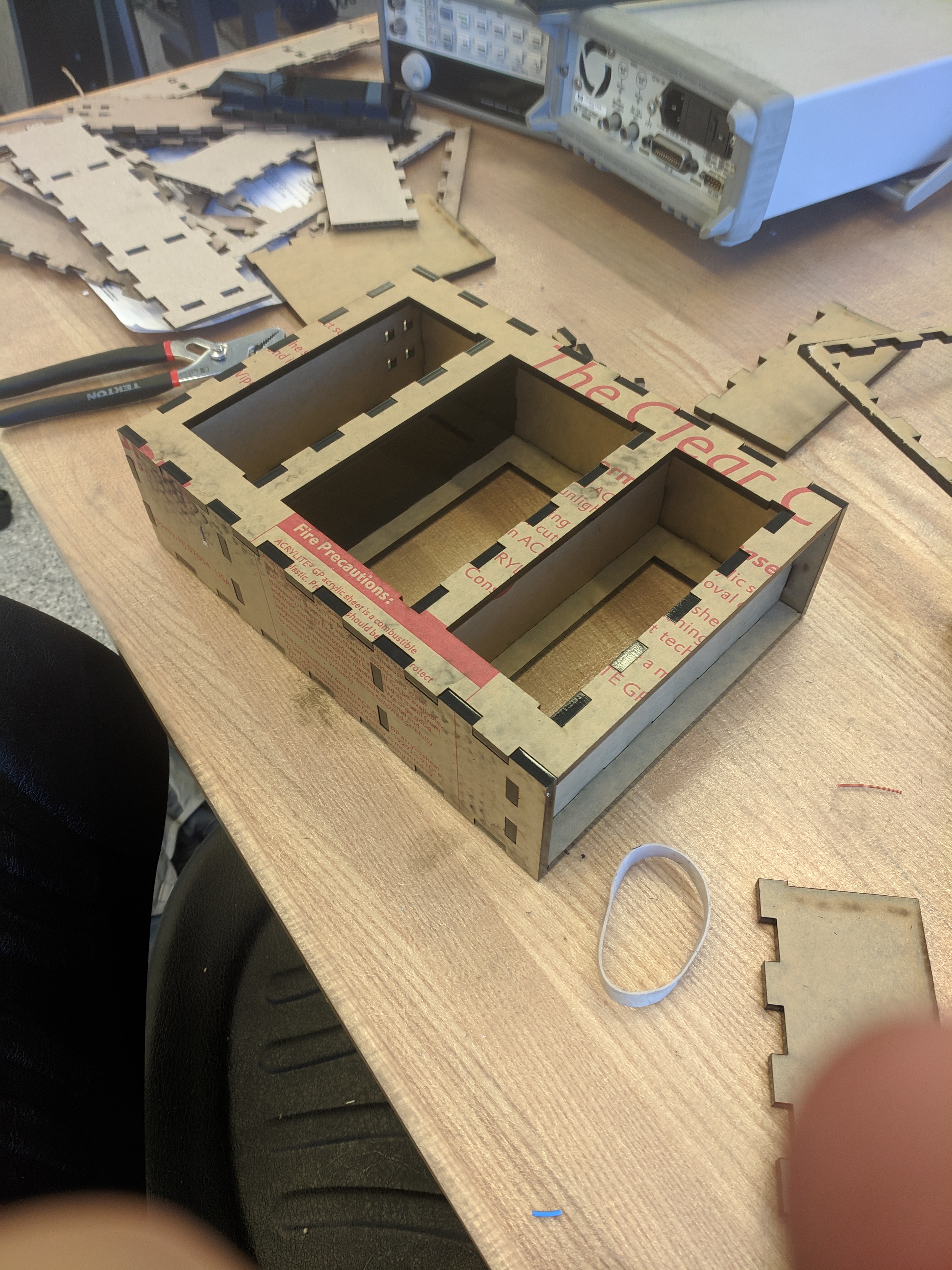
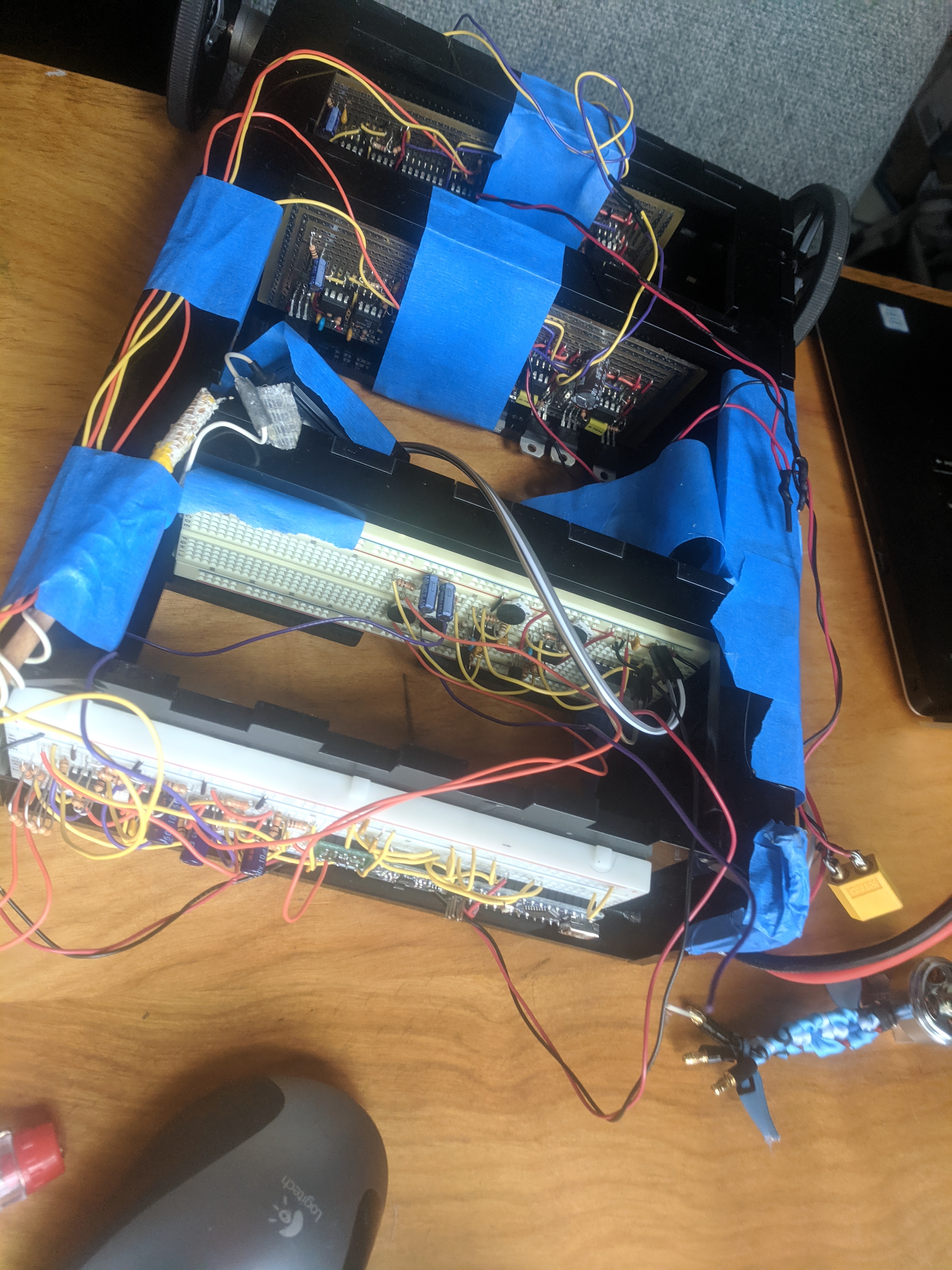
During the spring of 2019, I took 6.101, an analog electronics lab class. I decided to build a build a miniature analog segway for a final project. I laser cut an acrylic frame, designed fully analog current-controlled reversible motor drivers, and implemented a state-space feedback system to control the cart. The feedback system included observers for the cart's angle from vertical and translational velocity using accelerometer and gyroscope measurements, as well as by measuring the current and back emf of the motors.
Detailed information about the controls system design and electrical engineering behind the project can be found here in the final report for the class.